Page 3 of 5

Work in Progress: Collaboration

On November 20, 2022, we had a great combined meeting with the Cookie Clickers from nearby Bennington. We each introduced our robots, discussed our design decisions, built, drove, and played.
We showed off our two-pronged approach: we have, at this point, built two mostly-complete robots. One uses a jointed arm as the collection and delivery mechanism, and one uses a slide lift to accomplish the same purpose. A big thank-you to the Vermont Academy for Science and Engineering for support in this endeavor!
We compared our claw designs; we have basically settled on some kind of pincer for handling the cones, but haven’t yet settled on a final design. We were able to show the progress we’ve made on our various prototypes, and the Cookie Clickers likewise showed off their manipulator and how it works.
Although our team’s space doesn’t allow for a full field, we had our mats set out with a few junctions so that we could drive around — mostly for fun, because who doesn’t like making a robot go?
Our teams then split in two, so that we could make alliances between us. We had a large paper gameboard of Power Play, designed and shared by team 12611 (Paper version: https://bit.ly/ftcboardgame 3D version: https://bit.ly/cadmodel) and had our alliances claim junctions to understand some of the game’s strategy.
We all had a great time! Flash forward to January 29th, 2023, when we joined them at their space on Main Street in Bennington.

Each team presented robots, in preparation for the Judges’ presentation at the upcoming Vermont State Championship competition on Feb. 11, at CVU in Hinesburg. While neither robot was completely finished, it was great to see them both actually on the field!
We are looking forward to joining the Cookie Clickers again at the competition!
Isaac: What I Did Last Summer

I had a great experience working at EPS in the engineering department this summer!
I worked as a mechanical engineering intern, and worked with a team of practiced engineers to design printers for a variety of customers and applications. This internship gave me a much better understanding of how the industry works, and helped me refine my own engineering skills, especially in computer aided design!
I went through one project, a fixture for holding parts steady while they were printed on, from beginning to finish, which provided a better overall sense of how the different departments in the company meshed along with their respective role in creating a final product.
Overall, it was a very beneficial experience for me, and I would be happy to do something similar in the future!

Real Engineering: A Visit to EPS
On November 11, the Manchester Machine Makers visited the workshop of Engineered Printing Solutions in East Dorset, VT. There, we shared our work with engineers who have real-world experience in robotics! We enjoyed a tour and got some fantastic suggestions about improving our designs.
Additionally, their donations have allowed us to experiment with new designs and try to get the right parts and tools for the job (as opposed to the usual club methods involving duct tape and rubber duckies).
A huge thank-you to EPS – we are very grateful for your partnership!


First Robotics in the News
It’s great to see the commitment to Robotics and STEM in Vermont! Informative article in SevenDaysVT

Work In Progress: October
So it’s been a while since we’ve posted, but that doesn’t mean we’ve been sitting on our duffs! No indeed, our workshop has been filling up with assorted springy poles, rulebooks, and robot parts, along with kids to put them together.

This season, the challenge involves “creating circuits” by placing cones over the aforementioned springy poles. If your cone is the one on top, you’ve claimed the “junction” and can count it as a connection point. Translating that to requirements was the first task. We spent the first couple of meetings throwing ideas around.
Because there are many ways to approach the basic problem of lifting and placing cones, the team decided to try more than one prototype. Zach set about designing an arm, which is a new assembly that the team hasn’t tackled before; while Isaac designed an improved slide/pulley lift based on the lessons that we learned last year.
We have shifted our coding practice over to Blocks, so that the entire team can work on the programs. Aleks has explored the “ExportToBlocks” functionality in the FTC codebase, changing over our instance-based classes for our assemblies into static, global members so that it can be used from Blocks OpModes.
We are always open to new members – there is plenty left to accomplish! So if you’re interested in joining our team, drop us a line or talk to Isaac, Takoda, Aleks, or Zach at school.



New Members Welcome!
The Manchester Machine Makers, a First Tech Challenge Robotics Team, are recruiting team members for the 2022-2023 season. We are open to students grade 7-12 in Bennington County. Our current team members hail from from Burr and Burton Academy, Long Trail School, and Maple Street School. We meet twice a week: Wednesdays from 5:00-7:00pm and Sundays from 10:00am-12:00pm.
Know a lot, a little, or nothing about robotics? All abilities are welcome, and we encourage students to come to a meeting, talk with team members and learn what we are about.
For more information email us at ftc16221@gmail.com and plan to attend our next meeting on Wednesday September 7 from 5-7pm at Smith Center, Burr and Burton Academy. The kick-off event for First Inspires FTC Challenge Power Play is Saturday September 10 where we will learn what our challenge will be for the year with the culminating Vermont State Championship scheduled for February 11, 2023.
The Manchester Machine Makers have been building awesome robots since 2019! We look forward to welcoming you to our team.

Programming our Navigation Bot
We built it, now we need to make it go, right?
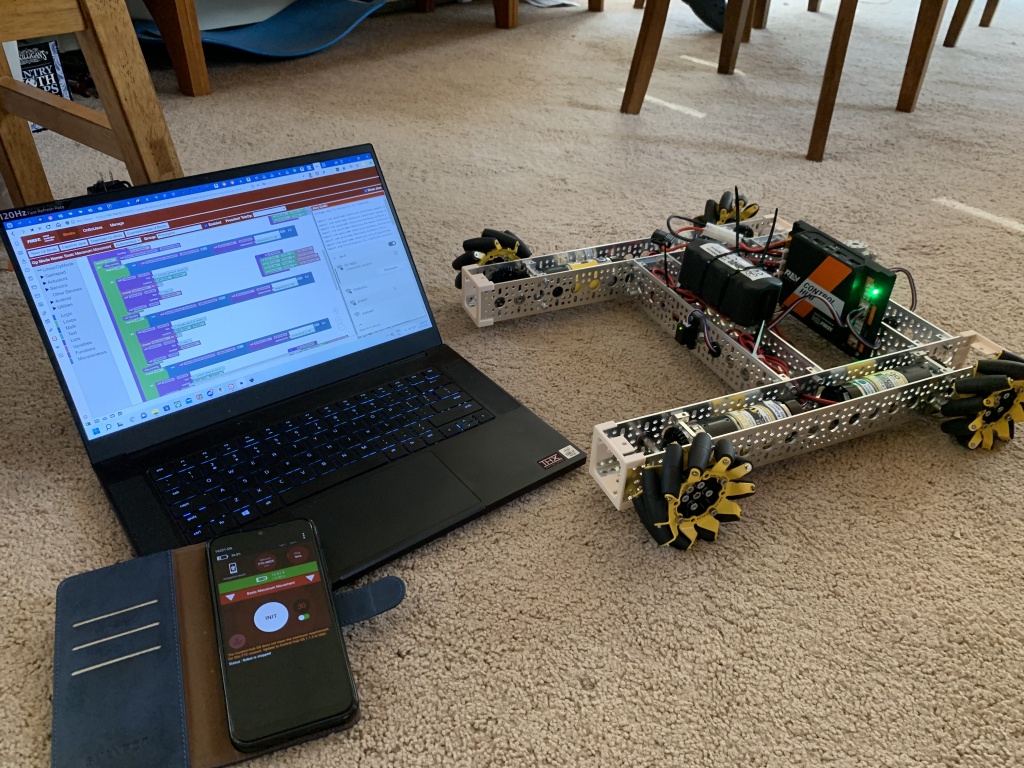
Our Navigation platform (how about “navbot” for now, at least until we name it properly – eh, Team?) consists of the goBilda mecanum “strafer chassis” with two REV distance sensors. We will add another two distance sensors before we are done, and a USB camera on a swivel mount, but that’s an upcoming project yet.
So we have a chassis and a couple of sensors to work with. No big deal! We pull up Blocks for this, and get it moving… why isn’t it moving?
So despite the fact that we are programming in blocks, guess what? We actually still need to know what we are doing. The motors still need to be properly initialized before they will run. Turns out that blocks can actually teach you real programming- who knew? We set the motors’ run mode and direction, making an initialization routine.

We put the chassis up on a book before trying to actually run it on a surface. Lifting the wheels off the ground allows them to run without spinning the navbot in circles – because the way the chassis is hooked up, the right-hand motors spin backwards from the left-hand motors. With that fixed in our code, we made a routine to run forwards, a routine to run backwards, and a routine to stop. Something like this (only in blocks, which are prettier):
private void run_forward() {
right_front.setPower(motor_speed);
right_rear.setPower(motor_speed);
left_rear.setPower(neg_motor_speed);
left_front.setPower(neg_motor_speed);
}There are two ways in which we could have fixed the wheel direction. One way was to set the direction on the left hand motors to REVERSE; the other way is to set the power to negative values. We chose the latter method.

The next step was to involve the distance sensors. We decided to have it run until it came close to an object, then stop. So, in pseudocode:
run_forward()
do
just_output_telemetry()
until (sensor.distance <= 30cm)
stop_running()
We had fun almost running into the dog (and he got very nervous) a few times, then added in the other direction. Since the front sensor is in the middle of the robot and the rear sensor is at the rear edge, the distance was adjusted to suit:
run_backward()
do
just_output_telemetry()
until (sensor.distance <= 10cm)
stop_running()You’ll notice that we actually wait to make sure that we’re not already less than 10cm from something before we run backwards. We do the same check before running forwards. So the full loop is:
wait until front.distance > 30cm;
run_forward;
wait until front.distance <= 30cm;
stop_running;
wait until back.distance > 10cm;
run_backward;
wait until back.distance <= 10cm;
stop_running;
So it’s not very smart yet, but now it goes back and forth like a pendulum-on-wheels.
Up next: the camera! Stay tuned.
Congratulations to our Graduates!



It’s been a great year, and we’ve been truly lucky to have such a great team. So it’s with an equal measure of dismay and pride that we send off our three Seniors into their next adventures: Charlotte, founding member, hardware specialist, public relations lead, and project manager (and by night, more of the same!); Jacob, engineer and driver extraordinaire, and Amos, all-around assembly designer/builder/musician/etc. We wish you all great success and we will miss you!
While we will have a hard time filling all those shoes, we will have our returning members with yet another season’s worth of experience under their belts. And of course, we’ll have plenty of room for more budding roboticists! David and Patty are returning as coaches with at least some of Meg’s help (what would we do without Meg?); and we are partnering with EPS, and with BBA, to make robotics engineering more available to the youth in our community.
This summer’s project is to construct both a stationary programming board and a mobile programming board as a development platform for our navigational systems, funded by a grant from the Vermont Academy of Science and Engineering this past winter. We don’t know what the next game will be, but it’s a fair guess that we’ll have to navigate! We will use a goBilda strafer chassis as a base, with the REV Robotics Control Hub, a camera, and four distance sensors. Stay tuned for updates.
We’re looking forward to the start of next season’s game, “Power Play”, and we hope you’ll join us!
(Also, we have the contact info for Charlotte, Jacob, and Amos in our back pockets. Just sayin’.)

Freya’s Screen Debut, and a New Home
We’ve been taking an actual Spring Break, believe it or not. Members slept in, went places, and did things completely unrelated to robots. No, really!
Oh, ok, so we did start working on a new project. Over a weekend we got together to storyboard and film Freya for her screen debut: Freya and Ducks à l’Orange! No duckies were harmed in the making of this film. We promise.
We brought Freya to meet her adoring public at the Bennington Area Makerspace on May 7th, joining the Cookie Clickers at their Open House. She worked beautifully!
We also started May in our new home in the Smith Center at Burr and Burton Academy. We are incredibly excited to be invited to share the Robotics Lab with Mr. Morrison’s students! We had visitors there last Monday, and all had a great time driving around the lab and delivering balls, cubes, and ducks to each other.
It’s been a great year in our workshop provided by TPW Real Estate, and we will miss our awesome garage space. It allowed us to meet safely this year even during the Delta and Omicron waves, so that we could bring Freya to the VT State Championship.
Having community support is how we keep the program going, bringing STEAM enrichment to area students. While the majority of our current members are attending BBA, we welcome 7th-12th graders from any school (or homeschool) in the area. There are no membership dues or costs beyond transportation; expenses come entirely from grants and donations. Thus we are truly grateful for the support of TPW and BBA in providing the team a home.
