FIRST™ Technical Challenge (FTC) Comes to Bennington!
PUBLIC WELCOME!
Sat 1/31, Mount Anthony Union Middle School (MAUMS). 7:00 A – 5:00 P with main public spectator portion 10:30 A – 3:00 P.
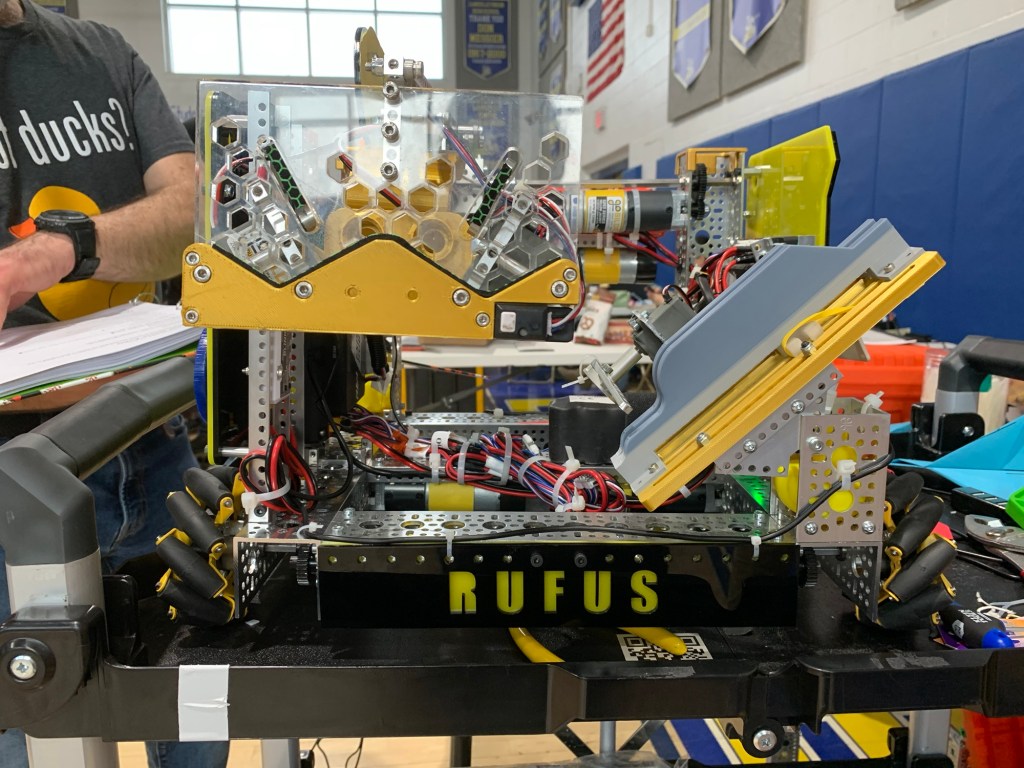
Local FTC robotics teams, #18650 The Cookie Clickers, #32473 The Bennington Bolts and Biscuits, and #16221 The Manchester Machine Makers are thrilled to be hosting a Regional Qualifier for the FTC robotics competition at Mount Anthony Middle School in Bennington, VT on Sat 1/31.
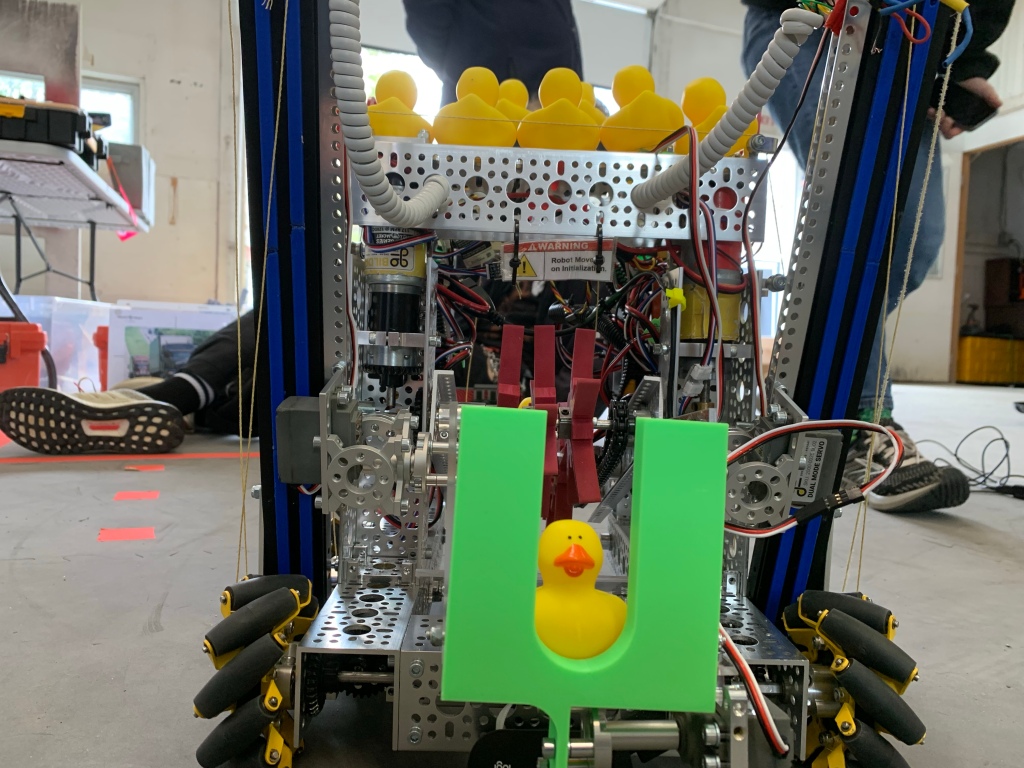
This event will feature teams from Vermont and neighboring states with students 12-18 years old competing and cooperating (coopertition) in matches centered around this year’s archeological theme in the DECODE™ game.
Do you or someone you know think it is important to provide science, technology, engineering, and mathematics experiences for youth in our community? Do you like to see kids learn and grow in team sports? Want to just be part of an amazing day of “gracious professionalism” in the form of “cooperative” robotics?
Consider volunteering to help with this event.
You can learn more about FIRST™ FTC at the bottom of this message.
We are currently looking for lead volunteers to help with the event in the following areas:
Lead Score Keeper – “Loves to learn and play new games and understand all the rules.” – ROLE: Sets up and manages the FTC-Live scoring system for the event. Works with the Event Director, Judge Advisor and FIRST Technical Advisor to provide match details, schedules and event printables. Distributes tablets to other event users (ex. Referees and Head Referee). HELPFUL SKILLS: Strong system administration, accuracy of match results and awards, multi-task to provide all requested schedules and reports for event flow, technical confidence. Works well with all event volunteers.
Lead Robot Inspector – “Did you say checklist? Count me in.” – ROLE: Reviews and understands game manual and robot specifications required for inspection; recruit, train and coach robot inspectors. HELPFUL SKILLS: Safety mindset, detail oriented, comfort with specifications and rules, ability to use checklists, hold firm on inspection standards while also supporting teams with technical guidance to ensure their robot is match-ready.
We also need lots of other volunteers who would have, mainly, day-of responsibilities. These include: judges, referees, scorekeepers, queuers, field reset, pit admin, etc. Can you spread the word?
Interested in volunteering? Contact Ben Schwartz, 925-520-5208, benjamin.schwartz@me.com.
General questions about the event? Contact Chris Callahan, 860-380-0448, cwcallahanny@gmail.com.
About FIRST™ Robotics First Technical Challenge (FTC): https://www.firstinspires.org/programs/ftc/
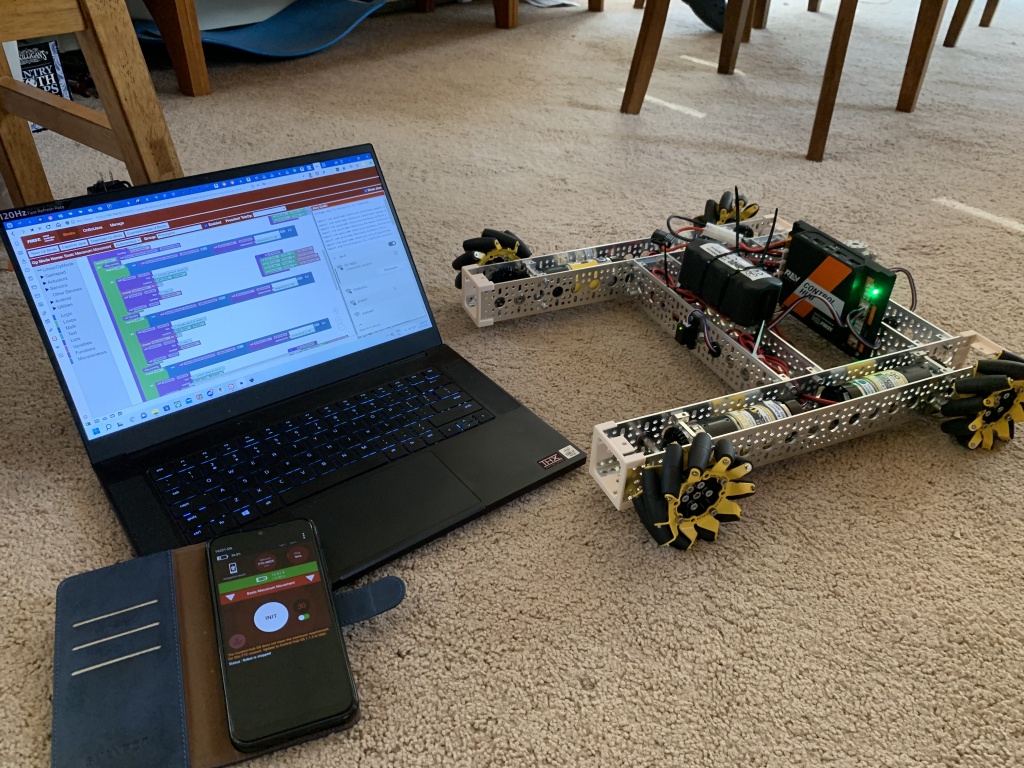
FIRST™ Tech Challenge (FTC) is an international middle/high school robotics program (grades 7-12) where student teams design, build, program, and operate robots to compete in yearly, themed challenges, developing STEM, teamwork, and engineering skills through hands-on innovation and community outreach, all guided by mentors and adult coaches. Teams use a reusable kit to create robots that play complex games on a 12’x12′ field, scoring points by manipulating game elements autonomously and with driver control in alliance-based matches, learning leadership, problem-solving, and project management along the way.
Video Introduction to FIRST™ FTC: https://youtu.be/y5NPp_5KHuk
This year’s competition video: https://youtu.be/LCqWA6gSCXA