Join the Manchester Machine Makers at the Manchester Community Library on Saturday, May 30, 11:00am – 1:00pm for a Robotics Show & Share event!
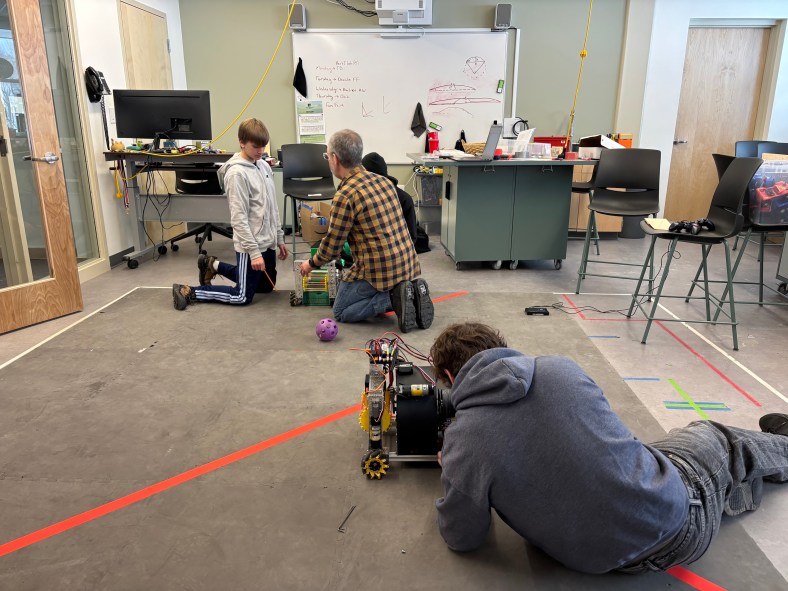
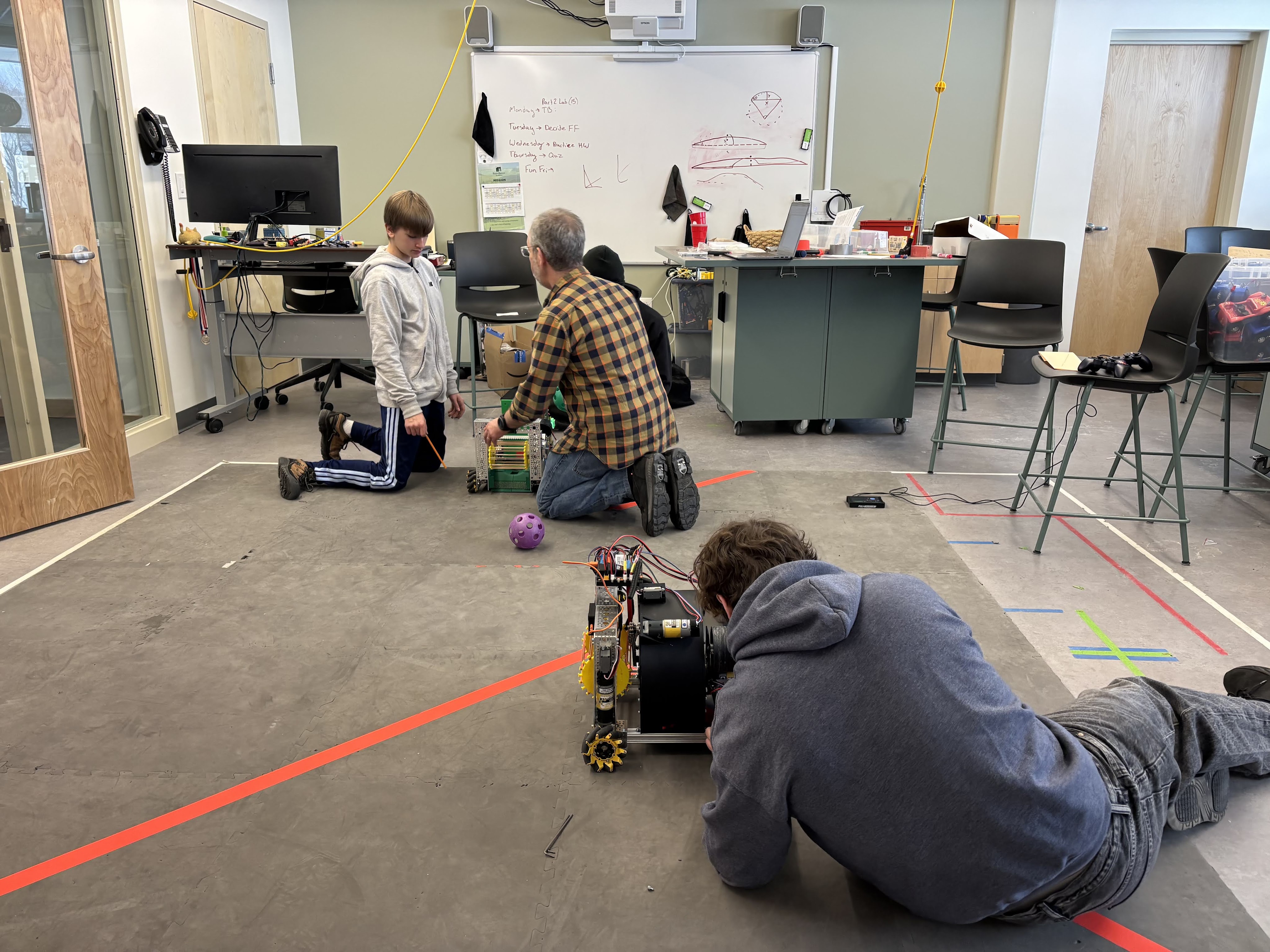
Manchester Machine Makers (MMM), a 4-H sponsored FIRST® Tech Challenge team, is hosting a Robotics Meet-And-Greet for (Southern) Vermont at the Manchester Community Library. We will set up stations to teach people with all different levels of experience about the different aspects of robotics, including hardware (Building the robot) and software (Coding the robot). With a couple of basic robots, we can drive around the room.
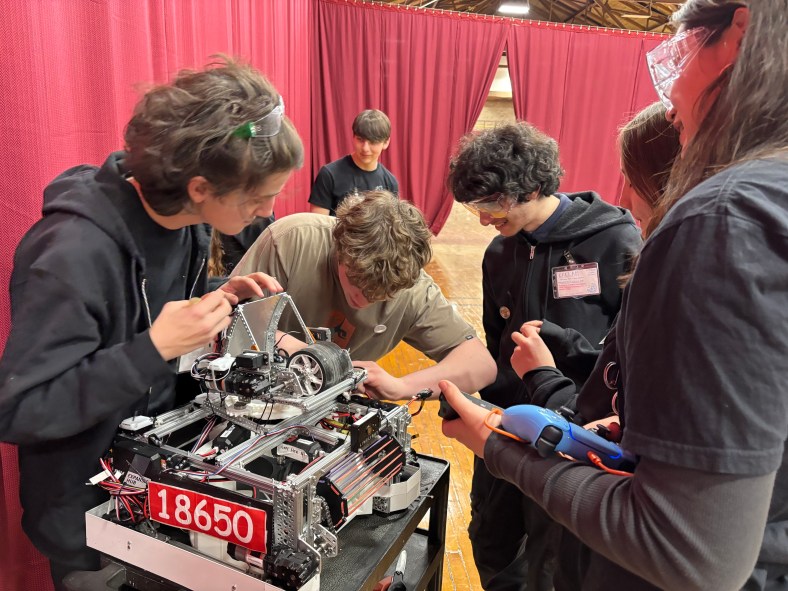
Our neighboring team, FTC #18650, the Bennington Cookie Clickers, will come and tell us about their experiences traveling to the FIRST Tech Challenge World Championships this spring in Houston, TX, after they won the Inspire Award at the Vermont FTC Regional Championship.
If you have your own robot, please bring it! If you don’t, learn how to build, program, and drive ours!
As a 4-H club, MMM is open to all students grades 7-12 (ages 12-18) in the local area who are interested in Science, Technology, Engineering, Art, and Math (STEAM) and/or robotics. MMM invites anybody interested in STEAM to join us for the Show & Share and learn more about what is being done to promote STEAM education in our community. Join us as we explore the future.
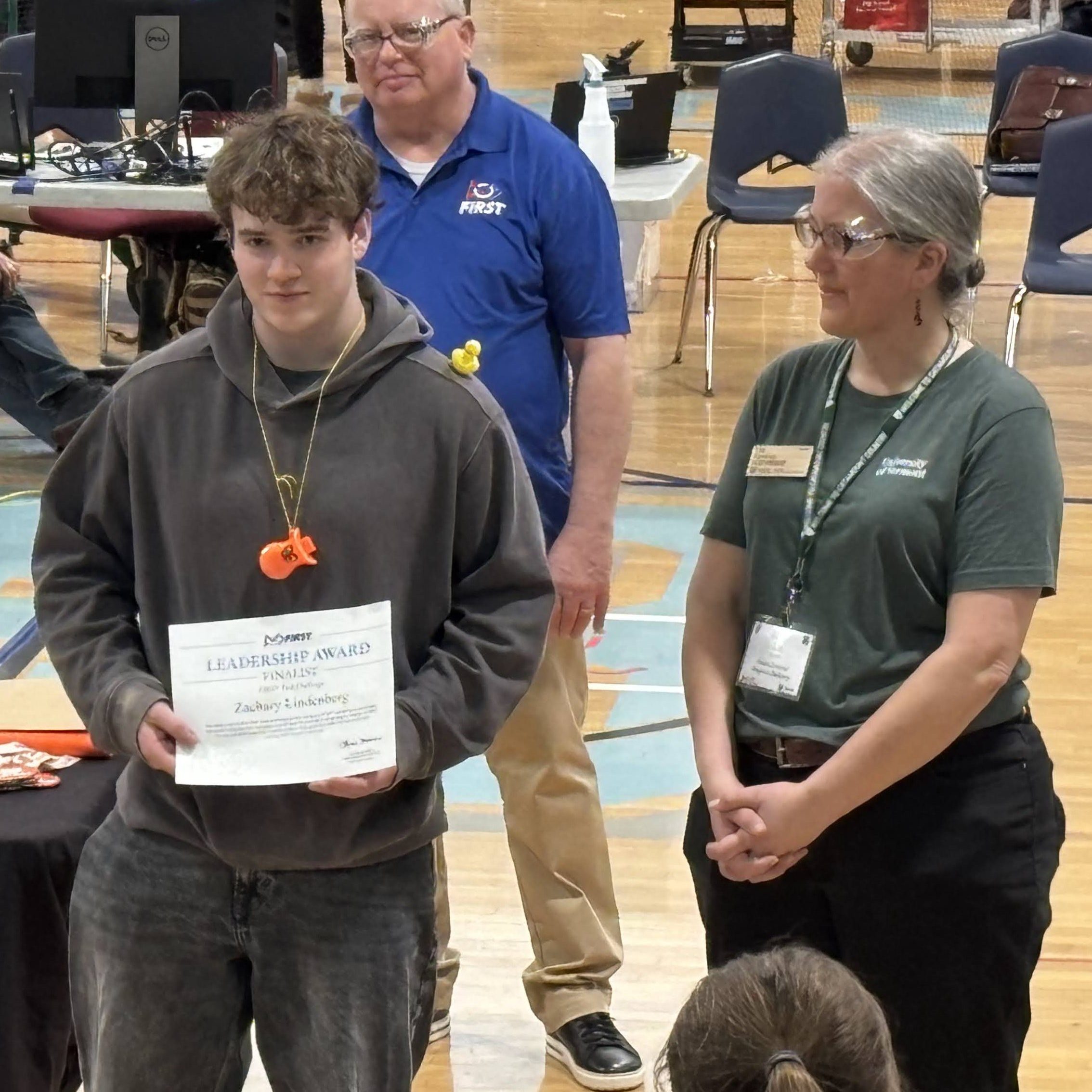
Zach, a 5-year veteran of the Manchester Machine Makers 4-H Club and FIRST Tech Challenge Team #16221 and a junior at Burr and Burton Academy in Manchester Vermont, was recognized at the Vermont State Championships held on Saturday March 7 at South Burlington High School in South Burlington, Vermont as one of two FIRST Tech Challenge Leadership Award Finalists representing Vermont.
This award is a significant recognition of Zach’s dedication and leadership on the team and for the FTC community. He and Miles Vernon were both recognized by the Manchester Machine Makers as Semi-Finalists. To be selected as a Finalist from across all teams in Vermont is an honor which can lead to future opportunities in STEAM.
Congratulations!
From FIRST: What is the FIRST® Leadership Award?
The FIRST® Leadership Award recognizes the dedication and individual contributions of outstanding secondary school students participating on FIRST® Tech Challenge or FIRST® Robotics Competition teams. Students in 10th or 11th grade are eligible to be nominated by their team for the FIRST Leadership Award for excelling in areas such as leadership, entrepreneurship, and dedication to advancing the mission of FIRST within their communities.
There are four (4) levels of the FIRST Leadership Award.
FIRST Leadership Award Semi-finalists – comprised of the two (2) students in their 10th or 11th school year* nominated by each team.
FIRST Leadership Award District Championship Semi-finalists (FIRST Robotics Competition only) – The students selected at District events to be interviewed at the District Championship for Finalist consideration.
FIRST Leadership Award Finalists – The students selected for each Regional and District Region.
FIRST Leadership Award Winners – comprised of the ten (10) FIRST Robotics Competition and ten (10) FIRST Tech Challenge students selected from the applicable FIRST Leadership Award Finalists.
The students who earn FIRST Leadership Award status as a Semi-finalist, Finalist or Winner, are great examples of student leaders who have led their teams and communities to increased awareness for FIRST and its mission, champion FIRST Core Values such as Inclusion, and embody Gracious Professionalism®. It is the goal the FIRST Leadership Award Winners will continue, post-award, as great leaders, student alumni, and advocates of FIRST.
In 2019, the Woodie Flowers Memorial Grant was established for FIRST Leadership Award Winners pursuing STEAM fields of study.
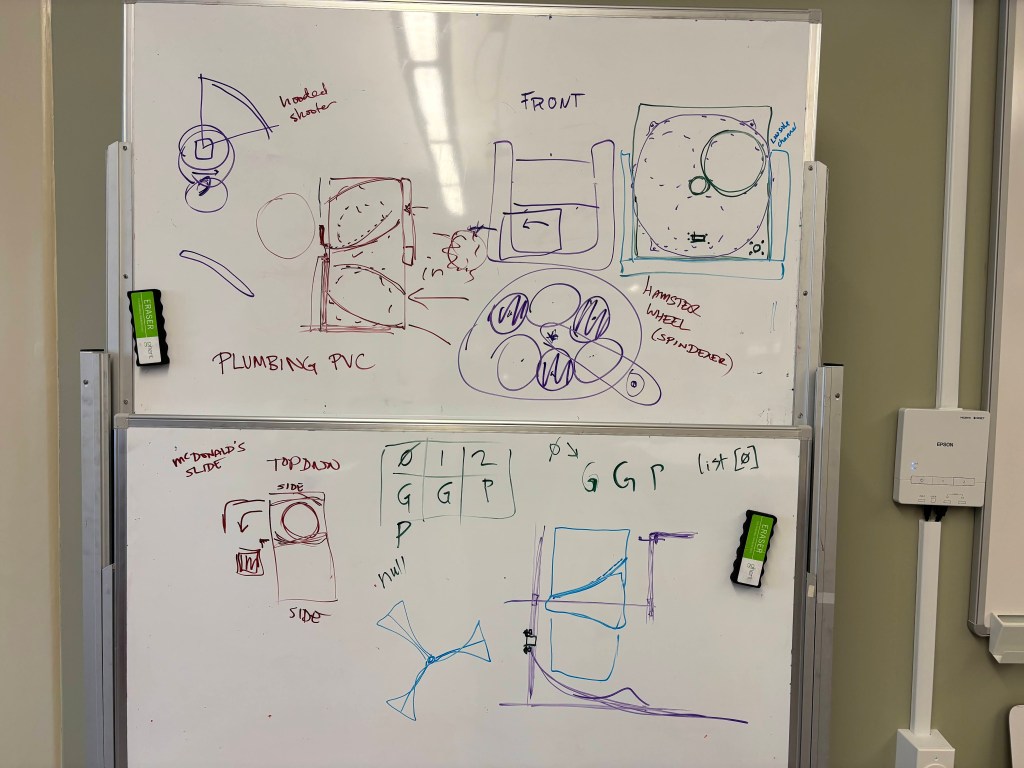
The kickoff for FIRST: AGE – DECODE now seems an age ago! We’ve been through the exploratory builds, design and build of robot V1 (Jimmy Sheutron) and then the design, CAD, and build of robot V2.
Liam, Zach, Miles (and Ben in spirit) with their Inspire Award 3rd place trophy at Vermont Regional ChampionshipsZach, Miles, Ben, and Liam with their Inspire Award runner-up trophy at the Norwich Qualifier
December saw a change of plans – V1 had some design flaws which would limit its capabilities, no matter how many improvements we made. So the team made a mid-season choice to return to the drawing board for a completely new design. It included mechanisms that could theoretically accomplish every challenge the game offered.
V1 went with us to compete in the Bennington Qualifiers, which we helped host along with the Cookie Clickers and the Bennington Bolts & Biscuits. He was slow but steady, and did very well for us, earning a name (Jimmy Sheutron)! It was the first competition day where we didn’t need to fix things in a hurry between matches, which felt pretty remarkable. A couple of teams came from neighboring states, showing off a whole different level of competition than our low-key Vermont region usually experiences. So that Qualifier was a really useful day for our team, teaching us how to play the game and giving us a clearer idea of what the robot ought to be able to do.
Exhilarated from Bennington, the team threw themselves into a round of improvements on V2, while still learning to code and refine Jimmy. We just barely decided to take V2 to the Northfield Qualifier, hosted at Norwich University. Given its Work-In-Progress state, it was very impressive. It showed off its potential as our drivers improved with each match, being chosen as an alliance partner for the playoffs. Additionally, the team came home with a second place in the Inspire Award, which is a real honor.
Inspire Award Criteria
The team that receives this award is a strong ambassador for FIRST programs and a role model FIRST team. This team is a top contender for many other judged awards and is a gracious competitor. The Inspire Award winner is an inspiration to other teams, acting with Gracious Professionalism® both on and off the playing FIELD. This team shares their experiences, enthusiasm, and knowledge with other teams, sponsors, their community, and the JUDGES. Working as a unit, this team will have shown success in performing the task of designing and building a ROBOT.
Team is able to describe, demonstrate, document, or display their experiences and knowledge to the JUDGES.
Team must submit a PORTFOLIO.
The Inspire Award celebrates the strongest qualities of all the judged awards. A team must be a strong contender for at least one award in each of the following judged award categories:
Machine, Creativity, and Innovation Awards,
Team Attributes Awards, and
Think Award
Team must be positive and inclusive, and each team member contribute to the success of the team.
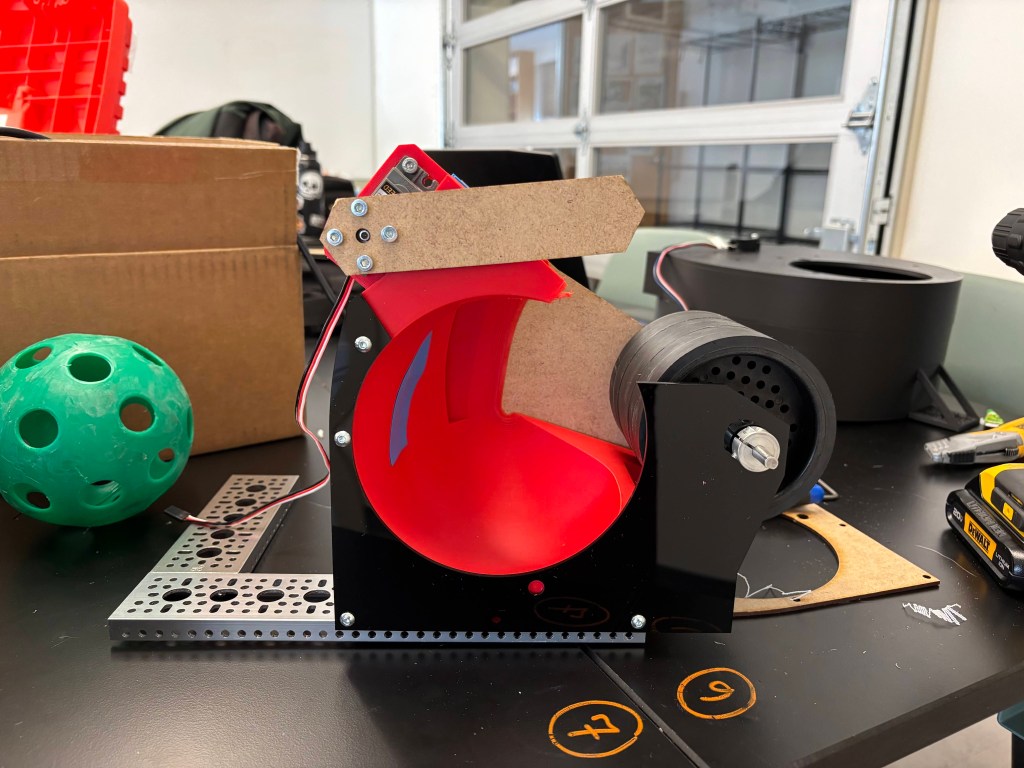
Then, into the home stretch – with three weeks before the Vermont Regional Championships, and school vacation and travel, the team really put in the extra effort. They worked to refine the flywheel launcher, fabricate a lift mechanism, and tune RPMs vs. distance. Our chief code monkey wrote the Autonomous routine using both two-wheel + IMU odometry and the Limelight camera to localize with AprilTags. Our drivers practiced, and everyone pitched in to write an Engineering Portfolio that they could be proud of.
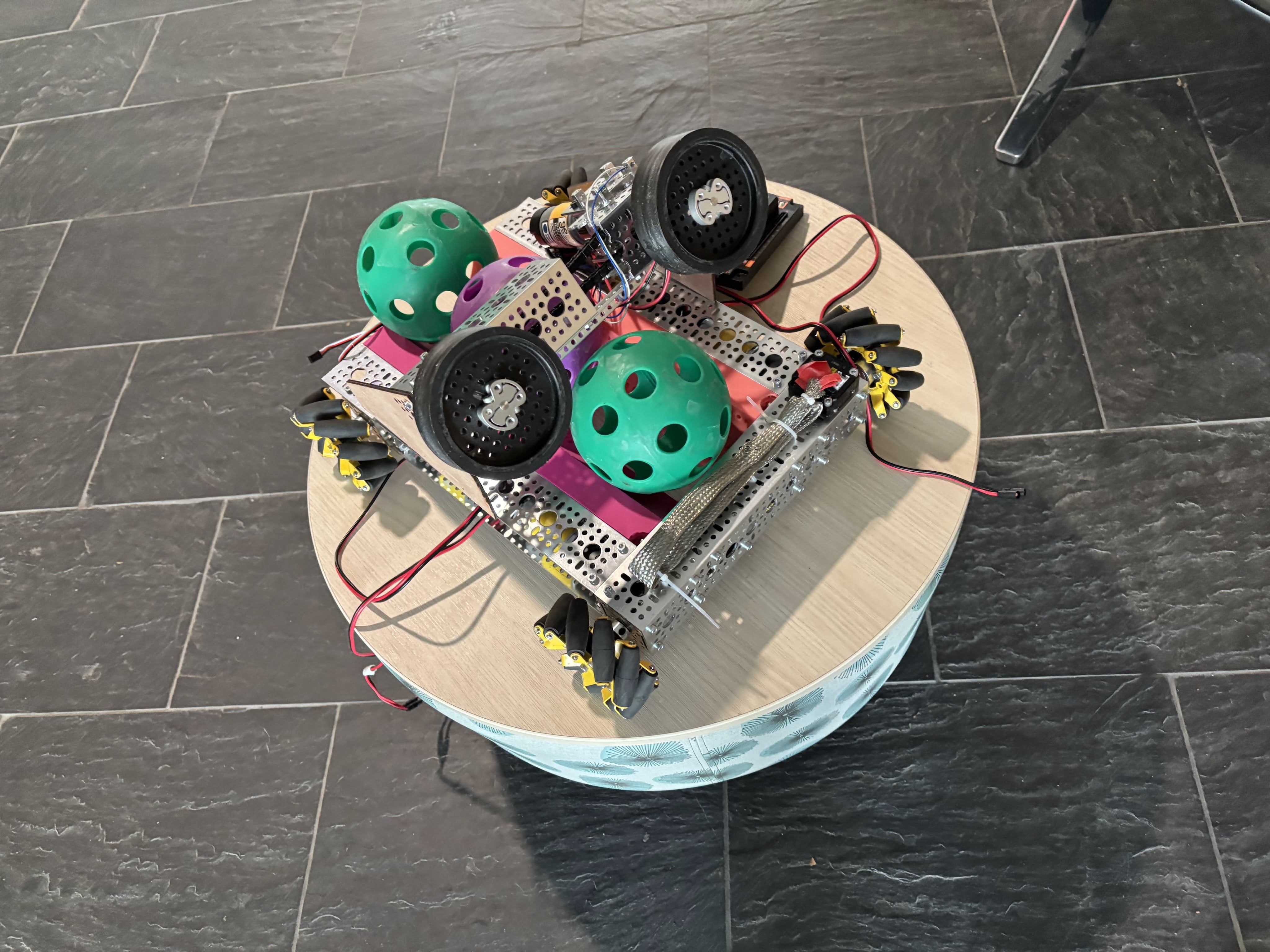
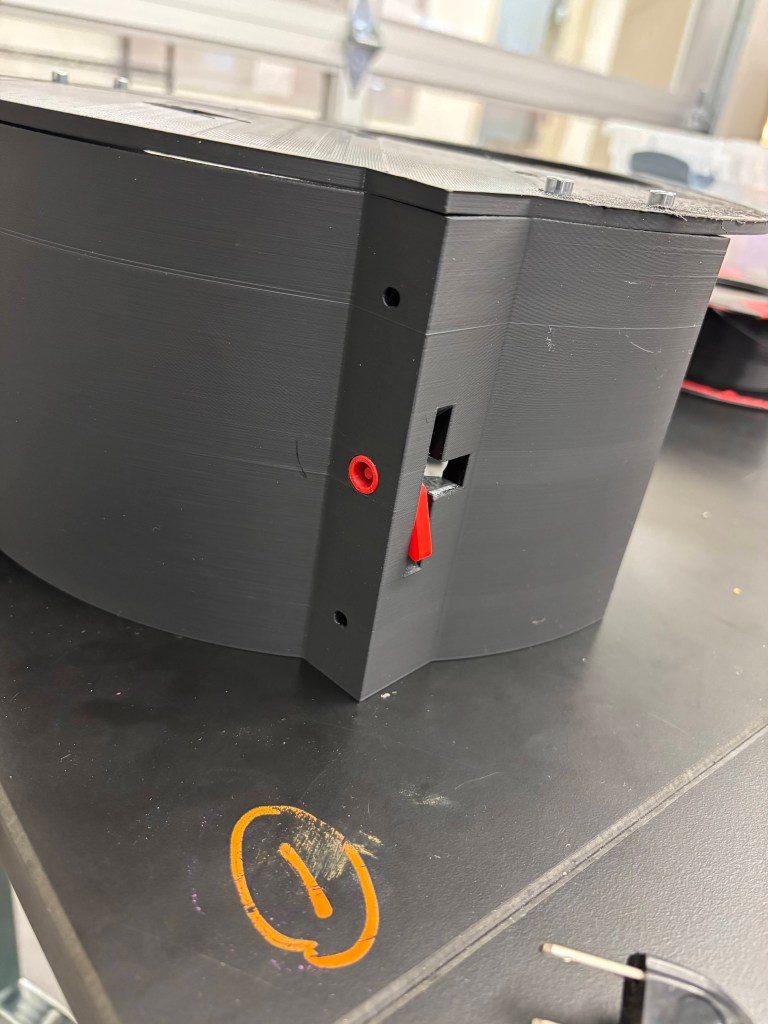
By the time the competition arrived, V2 could do everything reasonably well, and was a pretty interesting machine. It could intake artifacts (big wiffle balls) from anywhere on the field, drive with some nimbleness, index and sort the different colors of artifacts, recognize the AprilTag on the obelisk to determine which pattern to shoot; it could shoot three balls in pattern, in any order, or single balls of a specific color or any color. The drivers could set the flywheel to a near-target RPM or far-target RPM. The base was not so large that it would preclude any other robots from partially parking in the home base at the end of the game, allowing for a consistent full park + partial park score. It had a three-artifact autonomous routine that would also move appropriately, contributing to a Move Ranking Point in any match.
By midmorning, there were a great many “shoulder ducks” to be seen among other teams and volunteers as well, showing off our unique Manchester Machine Makers “got ducks?” style.
Qualifying rounds are always unpredictable, but the team gave a solid performance, ranking in the middle of the pack after five intense matches. V2 was easy to maintain, only needing fresh batteries between matches. With the code well-organized, we had the luxury of working on an enhanced autonomous during breaks without worry of breaking the main tele-op routine.
The judges were very busy throughout the competition and asked insightful questions, listening closely to the team as they explained everything from their brainstorming process to their outreach plans. With the careful documentation of V1 and V2, and obviously knowledgeable team members, the judges awarded third place in the Inspire Award to the team, out of 25 teams!
Topping it all off, our most senior member, Zachary Lindenberg,was selected as one of only two Finalists from Vermont for the FIRST Leadership Award.
FIRST Leadership Award
The FIRST® Leadership Award recognizes the dedication and individual contributions of outstanding secondary school students participating on FIRST® Tech Challenge or FIRST® Robotics Competition teams. Students in 10th or 11th grade are eligible to be nominated by their team for the FIRST Leadership Award for excelling in areas such as leadership, entrepreneurship, and dedication to advancing the mission of FIRST within their communities.
Everyone on the team was happy to see the competition season come to such a successful close. While we’re not planning to go to any further competitions, we are planning to participate in 4-H Communications Day on March 21st in Rutland. We’ll also have another Robotics Day at the Manchester Community Library, and we plan to bring a robotics activity to the State Fair late in the summer, before the next competition season begins.
Come see us at our events to acquire your very own rubber ducky to ride on your shoulder!
FIRST™ Technical Challenge (FTC) Comes to Bennington!
PUBLIC WELCOME!
Sat 1/31, Mount Anthony Union Middle School (MAUMS). 7:00 A – 5:00 P with main public spectator portion 10:30 A – 3:00 P.
Local FTC robotics teams, #18650 The Cookie Clickers, #32473 The Bennington Bolts and Biscuits, and #16221 The Manchester Machine Makers are thrilled to be hosting a Regional Qualifier for the FTC robotics competition at Mount Anthony Middle School in Bennington, VT on Sat 1/31.
This event will feature teams from Vermont and neighboring states with students 12-18 years old competing and cooperating (coopertition) in matches centered around this year’s archeological theme in the DECODE™ game.
Do you or someone you know think it is important to provide science, technology, engineering, and mathematics experiences for youth in our community? Do you like to see kids learn and grow in team sports? Want to just be part of an amazing day of “gracious professionalism” in the form of “cooperative” robotics?
Consider volunteering to help with this event.
You can learn more about FIRST™ FTC at the bottom of this message.
We are currently looking for lead volunteers to help with the event in the following areas:
Lead Score Keeper – “Loves to learn and play new games and understand all the rules.” – ROLE: Sets up and manages the FTC-Live scoring system for the event. Works with the Event Director, Judge Advisor and FIRST Technical Advisor to provide match details, schedules and event printables. Distributes tablets to other event users (ex. Referees and Head Referee). HELPFUL SKILLS: Strong system administration, accuracy of match results and awards, multi-task to provide all requested schedules and reports for event flow, technical confidence. Works well with all event volunteers.
Lead Robot Inspector – “Did you say checklist? Count me in.” – ROLE: Reviews and understands game manual and robot specifications required for inspection; recruit, train and coach robot inspectors. HELPFUL SKILLS: Safety mindset, detail oriented, comfort with specifications and rules, ability to use checklists, hold firm on inspection standards while also supporting teams with technical guidance to ensure their robot is match-ready.
We also need lots of other volunteers who would have, mainly, day-of responsibilities. These include: judges, referees, scorekeepers, queuers, field reset, pit admin, etc. Can you spread the word?
FIRST™ Tech Challenge (FTC) is an international middle/high school robotics program (grades 7-12) where student teams design, build, program, and operate robots to compete in yearly, themed challenges, developing STEM, teamwork, and engineering skills through hands-on innovation and community outreach, all guided by mentors and adult coaches. Teams use a reusable kit to create robots that play complex games on a 12’x12′ field, scoring points by manipulating game elements autonomously and with driver control in alliance-based matches, learning leadership, problem-solving, and project management along the way.
The Cookie Clickers #18650 and the Manchester Machine Makers #16221 are hosting a party at the Manchester Community Library to celebrate the FIRST Tech Challenge AGE – DECODE kickoff on Saturday, September 6, 2025, 11am – 1:30pm. We hope that you all will join us for this second annual Southern Vermont kickoff!
We will begin at 11am in the community room at the Manchester Community Library:
138 Cemetery Ave., PO Box 1105 Manchester Center, VT 05255 Phone: 802-362-2607
As teams arrive, we will form a panel of team representatives to discuss last year’s experiences and this year’s goals.
At noon, the challenge will be released by FIRST, and we will watch the livestream on the big screen to learn the rules of the new game. (If you can’t make it and want to sign up for a reminder to watch the livestream on your own, you can do that here).
Then, we open up the brand new field (thank you, FIRSTinVT!) so that everyone can experience the genius of the AGE: DECODE game, with whatever robots we have from last year, or from the summer’s experiments. Feel free to bring your own robots as well!
There will be pizza for lunch, and each team will go home with a printed manual and a few game pieces.
We hope that you’ll all come and bring your expertise, ideas, and gracious professionalism to share!
Please let us know that you’re coming as a team so that we have enough manuals and game pieces on hand for you!
Join the Manchester Machine Makers at the Manchester Community Library on May 31, 1:00pm – 3:30pm for a Robotics Show & Share event!
Manchester Machine Makers (MMM), a 4-H sponsored FIRST® Tech Challenge team, is hosting a Robotics Meet-And-Greet for (Southern) Vermont at the Manchester Community Library. We will set up stations to teach people with all different levels of experience about the different aspects of robotics, including hardware (Building the robot) and software (Coding the robot). With a couple of basic robots, we can drive around the room.
Near the end of the event, people can share what they accomplished during the day and receive duckies for participating at a station. There will also be special ducks to earn, so give the day your all and have fun!
1:00 – 1:15 → Introducing the team
1:15 – 1:30 → Introducing the stations
1:30 – 2:45 → Stations
2:45 – 3:30 → Share achievements and receive duckies
As a 4-H club, MMM is open to all students grades 7-12 (ages 12-18) in the local area who are interested in Science, Technology, Engineering, Art, and Math (STEAM) and/or robotics. MMM invites anybody interested in STEAM to join us for the Show & Share and learn more about what is being done to promote STEAM education in our community. Join us as we explore the future.
The team spent two days at the beginning of April competing in the first FIRST Tech Challenge New England Premier event at the Eastern States Exposition (“The Big E”) in Springfield, MA.
This event, similar in many ways to last year’s New England Regional event, was twice the size and fantastic to behold. While our team was specifically invited to this event, other teams earned their spot in their choice of Premier Events. Thus, we had teams coming from Alaska, Colorado, Florida, North Dakota, Oklahoma, Arizona, Delaware, Canada, and Khazakstan in addition to every state in New England.
Teams set up booths with information about their season and their robotics journeys, as well as giveaways. Ben did his best to collect something from every team, covering his t-shirt with pins and stickers. Some of the teams set up games in which to win a memento – Ben, Dhruv, and other team members did their parts and valiantly obtained even the most challenging prizes.
Meanwhile, our drivers relied on Monster beverages to keep up their strength; but on day two decided to stick to coffee. Too much caffeine produces a loss of delicate control of the gamepads, and makes it difficult to steady nerves!
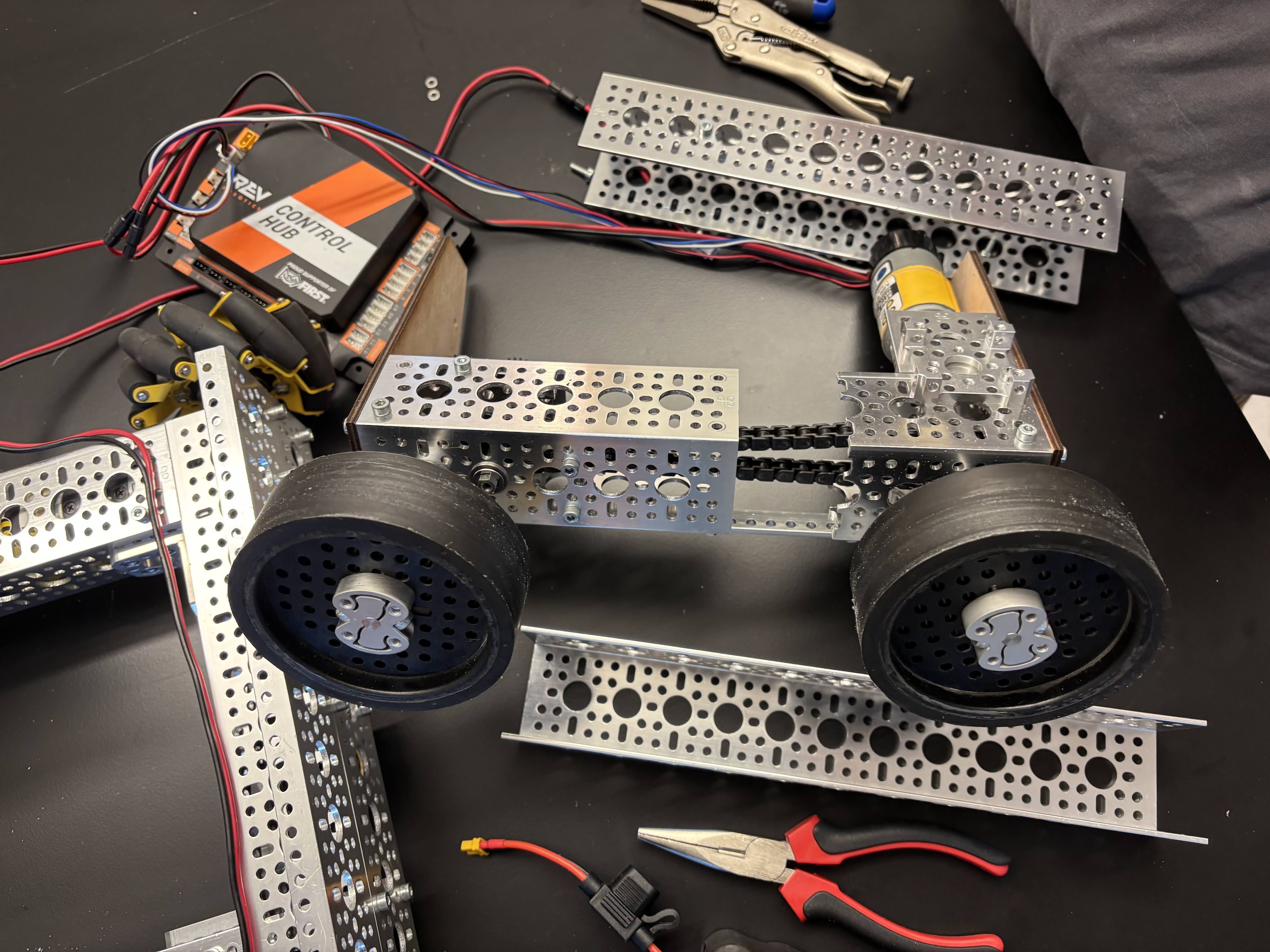
Cordelia performed incredibly well. This season we avoided both bevel gears and chain drives, and the simplicity of the gearing made her chassis very reliable. We did, however, see some trouble with the claw servo, and had some ESD issues that interfered with the autonomous routine. The optical odometry sensor became less reliable as the competition went on, and next season we’re planning to try standard odometry pods to see if they’ll give us the precision we want with the reliability we need.
This was also the first multi-day competition we’d had. With the grueling match schedule, it wasn’t surprising to see that we were not the only team that had increasing wear-related issues as the matches wore on! Even the top teams had break-downs and emergency fixes – they just had fewer, and were more adept at getting them quickly fixed.
Even with the vexing breakdowns, all our team members kept up each others’ spirits and encouraged other teams as well! Miles made time to help the Khazak team with their autonomous routine, and the whole team volunteered to assist at every opportunity to lend parts, run errands, or just bring cheer.
Our fellow Vermont teams performed admirably. While every team had challenges, Vermont teams showed up full of Gracious Professionalism and worked to be their best.
On Saturday, January 11, 2025, we went to the invitational scrimmage hosted at the University of Vermont. Our team has collaborated with another southern Vermont team, Bennington’s Cookie Clickers, this year, but this invitational served as a good chance to get to collaborate with everybody, as we don’t get many opportunities to work with teams from northern Vermont. This year’s challenge is rather complex, and to our surprise we saw that many teams had similar solutions to the challenge. A frequent design that we saw — and the one that we chose for our robot — is a linear slide system to allow the robot to reach this year’s higher scoring bins. Despite many robots having a similar base idea, it was interesting to discuss the smaller differences between every robot. We saw, for example, a number of different claw designs and strategies for how to pick up game pieces. We discussed with different teams about how they designed their claws, and we found things we hadn’t even thought of such as having the claw aligned horizontally rather than vertically.
After we compared our designs, it was time for a round of judging! Many of us hadn’t experienced a judging session before, so it was a great practice for the new members. We discussed our process in designing the robot and our current hardware, as well as our intended strategies. We started the presentation with a strong overview of our different hardware mechanisms, featuring our linear slides, rack and pinion servo, and our wrist and claw mechanism. To follow up our hardware presentation, we discussed our developments in our robot’s software this year. This year, we started by integrating the PedroPathing algorithm for pathfinding, a departure from our previous strategy of writing everything ourselves. Later in the season, though, we found that PedroPathing’s (at that time) lack of a proper Gradle library, and our lack of proper knowledge of the internals, was holding us back. So, at the last minute, our software lead sat down and wrote a block-based pathfinding autonomous, combining ideas and routines from previous seasons, which worked brilliantly. In the presentation as a whole, something that we plan to improve is how we distribute the information presented between team members; some spoke too much, others not at all. Our presentation was decent overall, though, and we have definite targets for improving it.
The last part of the invitational that we were able to attend was the practice matches, which led us to useful discoveries about our robot as well as potential game strategies. The scene was set: our robot waited, ready for action, on the full-sized playing mat, with the other teams standing ready. The suspense grew as the referee counted down the seconds to the moment of truth. Then, as the autonomous portion began, our robot was the only one that moved. We came to the realization that we were the only team with the foundations of a working autonomous. Our autonomous wasn’t anything too fancy yet, as it was just a simple parking mechanism we had recycled from a previous year, but nonetheless we managed to scrap it together for this season. The tele-op portion of the game, though, was a bit more interesting, as all teams had some sort of prepared tele-op system. Many different game strategies were used, but the main one that we saw was the usage of baskets. Our team designed our robot to be able to both score a basket and score specimens on the rungs of the submersible, so we were flexible with our scoring techniques. We tried a variety of different scoring methods, but we focused on getting better at hanging specimens, as the other teams wanted to prioritize basket scoring. We ran into a few technical problems, such as the traction of the claw not gripping pieces fully, though we hope to fix those in the coming days. The last part of the match struck and we raced over to the ascension zone, unrivaled again. In the final section of the game we discovered that we were the only team able to complete a level two ascent, which shocked us again as our ascension system used a similar design to many other teams’.
After some matches, we discussed claw designs with another team, along with the benefits of a horizontal claw versus our vertical claw. They showed us that they too had a vertical claw at one point, but got rid of it because after running some tests the horizontal claw proved to be more effective in sample collection. We hope to re-think our claw to make our collection easier. Since they were nice enough to help us out with our claw design, we helped them out with their difficulties with ascension. They also used a linear slide system to reach the higher collection bins, so we discussed how they could repurpose their slides as an ascension mechanism like we did. It was fun and constructive to provide feedback for each others’ robots, and, overall, we gained a lot of insight and ideas from our discussions. We hope to implement what we’ve learned as we continue to improve our robots, and to continue connecting with other teams to learn as much as we can. These collaborative events allow us to gauge our progress and improve our designs much more than we would be able to do otherwise. As such, we’d like to thank UVM for providing this incredible opportunity for all Vermont teams.
Overall, we are proud of where we are as a team and are on track to perform well in the state competition. We want to go as far as we can, and achieve the best we are capable of. We’re in a good place for this point in the season, and we hope to progress to regional competitions in Massachusetts again as we did last year.
We hope you all had a very happy Thanksgiving, enjoying many good things. We certainly did! The Green Mountain Girls will be supporting us again this year; I encourage you to also support them as a great non-profit organization that helps fundraise for other local non-profit groups (including us, yay!)
The Vermont Academy of Science and Engineering has also provided us a grant to further outreach to the Greater Manchester community, with which we plan to design a robot “kit” to give hands-on experience during limited-time, casual workshops. After we finish building our competition robots, Cordelia and Cornelius and Thomas, we will use that experience along with the grant to put together some open house opportunities.
We have also been the beneficiary of several private donors – you know who you are, and thank you so very much!
All donations go 100% toward supporting our FIRST Tech Challenge program. All mentors and coaches are volunteers, and as we charge no membership fees, all of our funding comes from grants and donations.
This Giving Tuesday, please consider donating to the future of humankind. We are a club that teaches the next generation of innovators how to build robots and work with the technology of tomorrow, building robots out of repurposed Android devices. Help us shape the next generation of engineers, entrepreneurs, and visionaries – donate to your local robotics club, the Manchester Machine Makers, today with PayPal here.