Thomas
Season: 2024-2025 “Into the Deep”
Thomas was an experimental Tank drive chassis, with the center drive wheel just slightly larger than the omni wheels at either end. With another hanging challenge, we wanted to see if we could build a base with fewer motors to lighten the load.
Cordelia
Season: 2024-2025 “Into the Deep”
Cordelia is a new, compact mecanum chassis with pairs of horizontal motors in parallel driving the wheels by pinion gears instead of bevel gears.
Cornelius
Season: 2024-2025 “Into the Deep”
Cordelia’s brother is a compact mecanum chassis originally designed with vertical motors driving the wheels by bevel gears.
Rufus
Season: 2023-2024 “CenterStage”
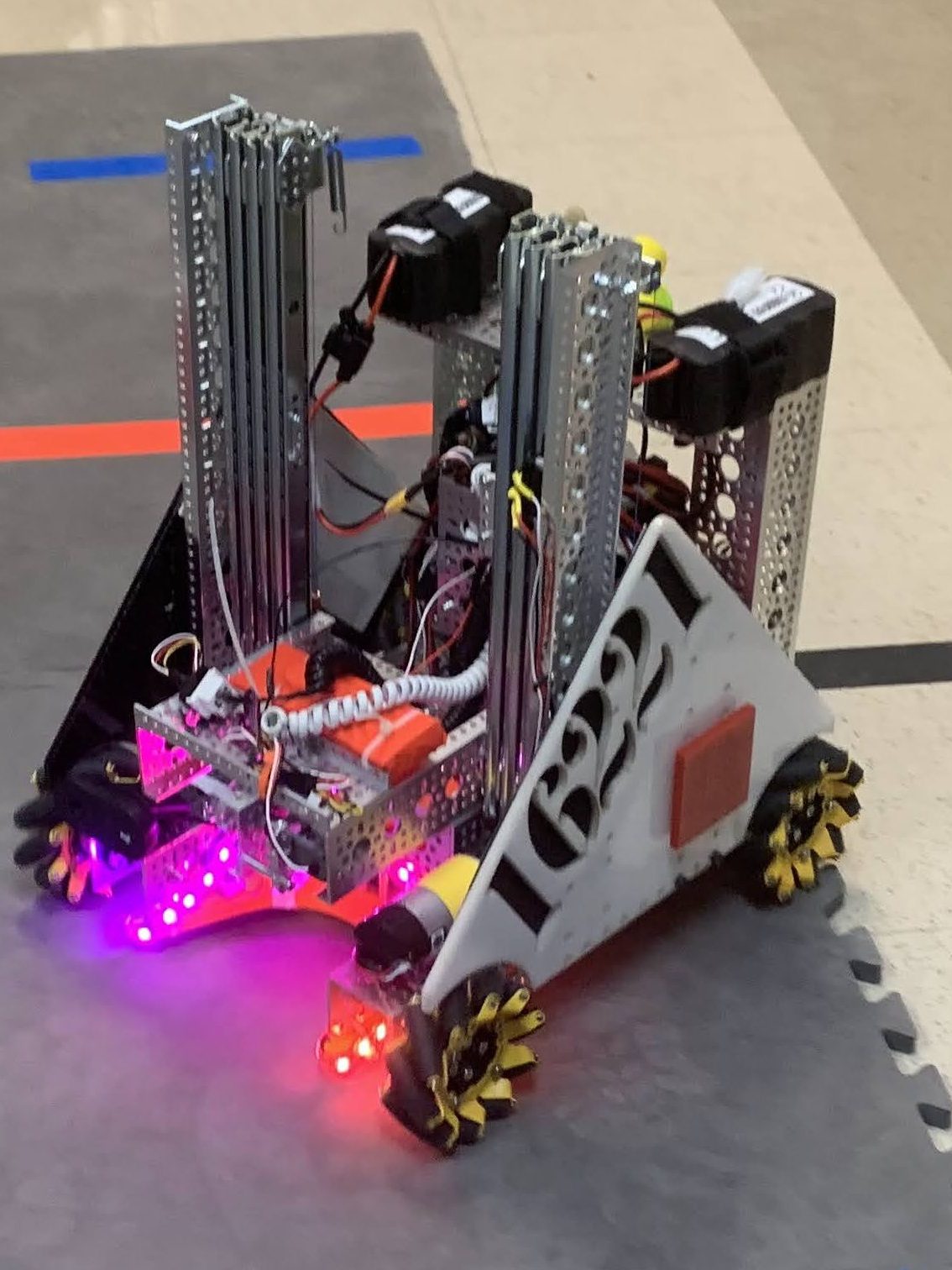
Rufus entered from the wings with Transformers-meets-Wally styling and a super-cool virtual 4-bar linkage arm for picking up pixels and “painting” with them on the backdrop. And just like any good stagehand, he could lift himself up into the rigging!
Ahnold
Season: 2022-2023 “Power Play”
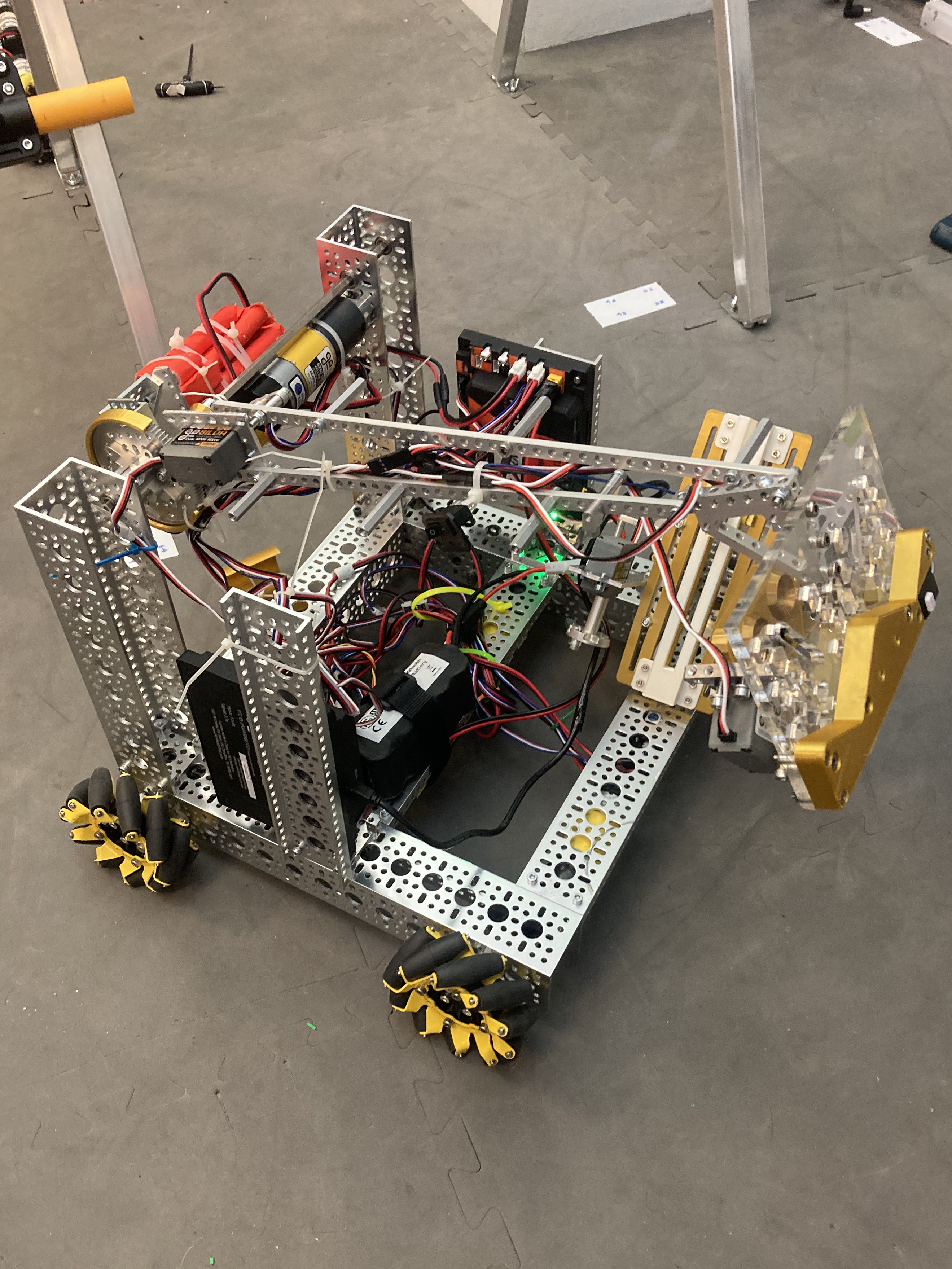
A paragon of German-inspired engineering, Ahnold and his cousins Hans and Franz will pump you up, for the Power Play challenge.
Specs:
- Drive Base: mecanum wheels, approximately 13″ by 13″
- Hans and Franz: vertically-mounted, pulley-driven linear slides (GoBilda Viper Slides)
- Grabber: servo-driven pincers
- Cone Locator: 3-D printed custom guide
- Underglow: LED strip for visibility
- POWER! Only one of those batteries actually powers the robot. (The other is for balance and style.)
Freya
Season: 2021-2022 “Freight Frenzy”
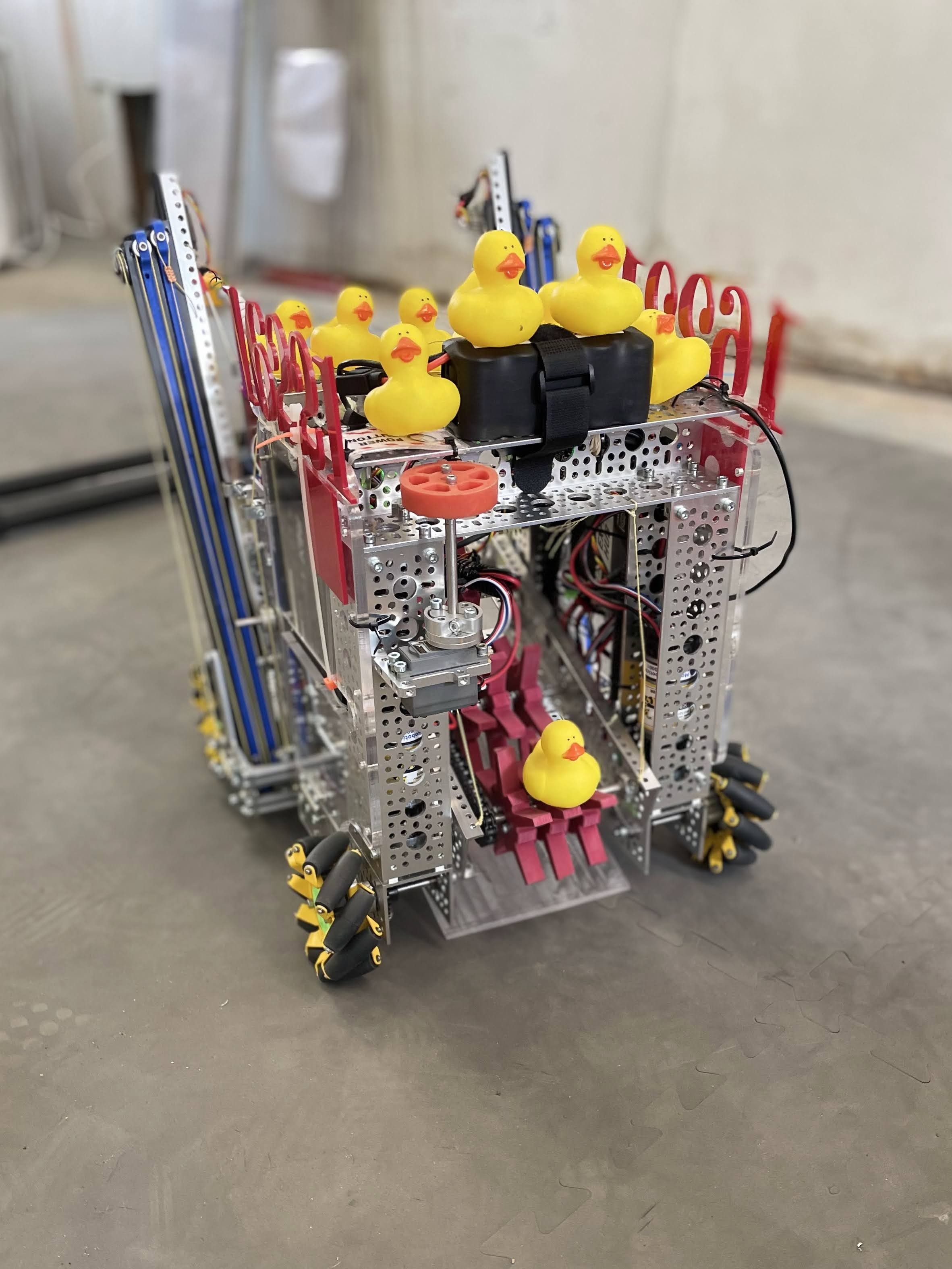
The home of the rubber ducky family during the Freight Frenzy challenge.
Specs:
- Drive Base: mecanum wheels, approximately 13″ by 13″
- Intake: active rubber spokes, runs both directions
- Delivery: pulley-driven linear slides, mounted at an angle, with a custom acrylic chute and an aligning door
- Ducky Spinner: who doesn’t like rubber ducks? A compliant wheel is mounted on a continuous mode servo.
Murphy
Season: 2020-2021 “Ultimate Goal”
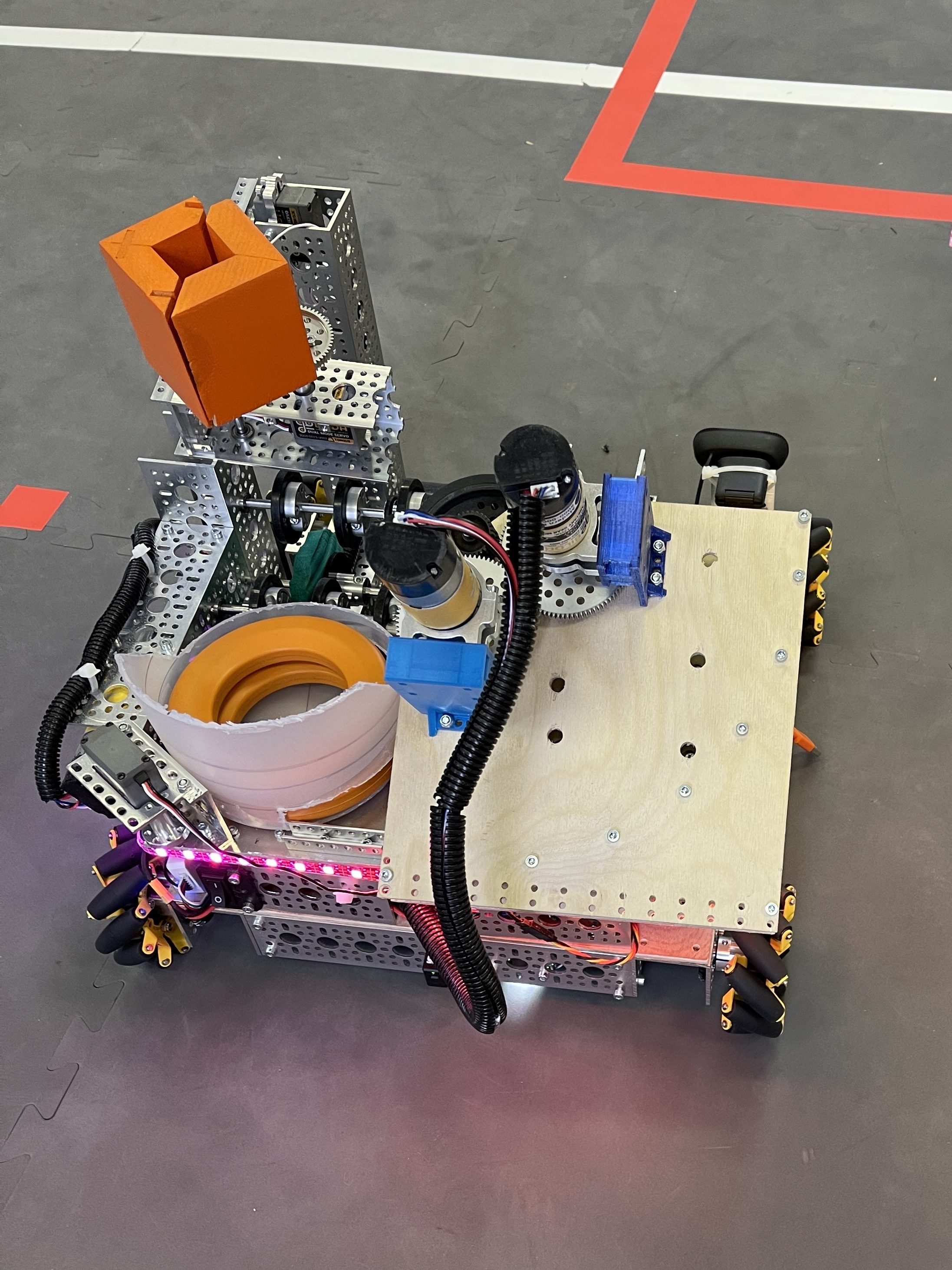
Our robot for the Ultimate Goal challenge.
Specs:
- Drive Base: Mecanum, with extra secret extra stuff
- Wobble Goal Grabber
- Shooter: 90° turn
- Magazine: Just a bucket, with pitching
- LEDs: Because why not?
Geoffrey
Season: 2019-2020 “Skystone”
Geoffrey was the robot the Manchester Machine Makers built for our rookie season, the 2019-2020 FIRST Tech Challenge season. He was built to complete the Skystone Challenge, which mainly consisted of moving and stacking blocks on the field. Geoffrey had a mecanum wheeled drive base which allowed him to strafe in any direction without having to turn. In order to move and stack blocks, Geoffrey had a wheel based intake. There were rows of wheels which led the block up a ramp to a platform where a claw grabbed the block by a nub on the top (they were shaped like LEGO bricks) and could then turn and stack it. Our claw mechanism had multiple servo motors so it could maneuver the blocks to be stacked precisely. The claw-block system could be raised as the stack grew using a pulley operated slide drawer system. There were other aspects of the game that Geoffrey accommodated too. There were special bricks that we had to design our claw around, and a platform we could move for extra points, and certain positions we could move to for points. These elements influenced our design and programming of Geoffrey. In the end, the team members and coaches worked together to create a working robot, and we plan to improve in the seasons to come.
Just getting started? A programming board is a good way to play around with the software on some basic hardware, if you don’t have room for a full setup.
